LPC2138マイコンは512Kbyteの大容量フラッシュメモリーを内蔵していますので、多彩なモーションデータなどを書き込んでおくことが可能です。また、60MHz・ノーウェイトで動作する32bit CPUのおかげで、従来では困難であった複雑なリアルタイム処理を行うことが可能です。
LPC2138マイコンは6chのPWMが内蔵されています。このPWM 4chをCPLD(XC9572XL)で時分割切り替えすることで、ジッタ(ゆらぎ)の無い32chサーボコントロールを実現しています。
EZ-SERVOはTeamKNOxが開発中の、RoboShellのソフトウエア・CPLDロジックを使用します。RoboShellはソースコード・HDLソースなどが公開(オープンソース)されていますので、ユーザが独自の機能を追加して拡張することも可能です。
(RoboShellインプリメント時のCPLDの使用率は70%未満ですので、ロジック部分にも追加機能を実装することが可能です。)

<スペック>
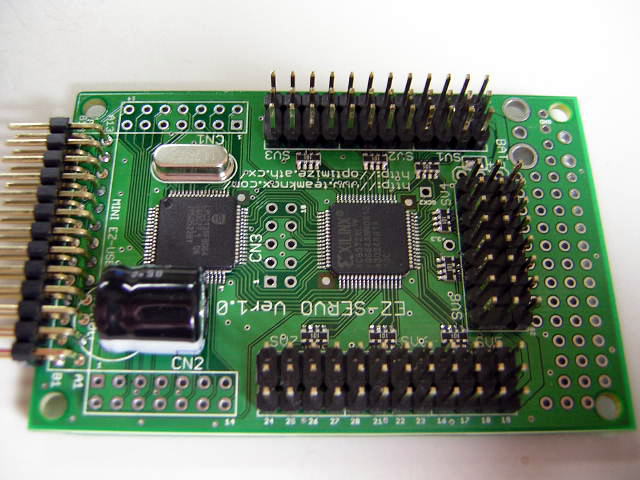
| 動作電圧 | 5V〜12V 12ch分サーボを別電圧で駆動可 |
| 動作電流 | RoboShell 58.98MHz動作時で約81mA (サーボ未接続) |
| 基板サイズ | 72x48mm 秋月電子ガラエポC基板と同一サイズ |
| 重量 | 23g (サーボコネクタ、L字コネクタ含む) |
安定的にCPUを動作させるためには十分な電源(バッテリー)用意してください。
回路図(PDF)ダウンロード
mini EZ-ARM7のページ(LPC2138開発情報など)
キットの入手はこちら